Hauptseite
(Myo hinzugefügt) |
|||
| Zeile 34: | Zeile 34: | ||
; [[ Robocode:Hauptseite | Robocode ]] | ; [[ Robocode:Hauptseite | Robocode ]] | ||
: In diesem Projekt werden die Kämpfe aus [https://de.wikipedia.org/wiki/Robocode Robocode] (Informatik-Vorkurs) in die Realität gebracht, um Schaukämpfe darstellen zu können. Zwei kleine Kampfroboter werden in einer auf dem Boden projizierten Arena die Bewegung aus Robocode eins zu eins imitieren und somit den Kampf nachstellen. | : In diesem Projekt werden die Kämpfe aus [https://de.wikipedia.org/wiki/Robocode Robocode] (Informatik-Vorkurs) in die Realität gebracht, um Schaukämpfe darstellen zu können. Zwei kleine Kampfroboter werden in einer auf dem Boden projizierten Arena die Bewegung aus Robocode eins zu eins imitieren und somit den Kampf nachstellen. | ||
| + | |||
| + | ; [[ Myo:Hauptseite | Myo-Armband ]] | ||
| + | : Hier entwickeln Master-Studierende eine Software, um mit einem speziellen Armband ([https://www.myo.com/ MYO]) eine Gestenerkennung für Gebärdensprache zu realisieren. | ||
; [[ Quadcopter:Hauptseite | Quadcopter ]] | ; [[ Quadcopter:Hauptseite | Quadcopter ]] | ||
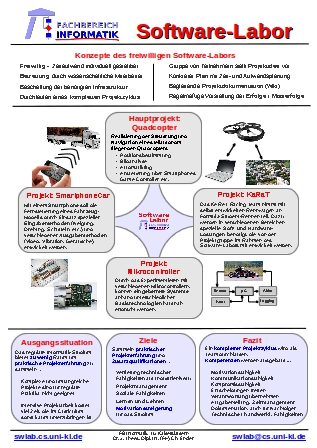
: Hier soll die Steuerung, Navigation und Flugdynamikregelung eines teilautonom fliegenden '''Quadcopters''' entwickelt werden. Dabei können neben den internen Lage- und Beschleunigungssensoren auch die von der Onboard-Kamera übermittelten Videodaten und die von außen aufgenommenen 3D-Daten einer Kinect-Kamera genutzt werden, um komplexere Aufgaben lösen zu können (siehe [http://www.spiegel.de/video/video-1170704.html Video]). | : Hier soll die Steuerung, Navigation und Flugdynamikregelung eines teilautonom fliegenden '''Quadcopters''' entwickelt werden. Dabei können neben den internen Lage- und Beschleunigungssensoren auch die von der Onboard-Kamera übermittelten Videodaten und die von außen aufgenommenen 3D-Daten einer Kinect-Kamera genutzt werden, um komplexere Aufgaben lösen zu können (siehe [http://www.spiegel.de/video/video-1170704.html Video]). | ||
| − | ; [[ Quadcopter:Hauptseite | Quadcopter-Simulator ]] | + | ; [[ Quadcopter:Hauptseite | Quadcopter-Simulator ]] |
: Hier wurde in Java eine Simulationssoftware für Quadrocopter entwickelt. Das darunterliegende physikalische Modell ist parametrisier- und erweiterbar. | : Hier wurde in Java eine Simulationssoftware für Quadrocopter entwickelt. Das darunterliegende physikalische Modell ist parametrisier- und erweiterbar. | ||
| − | ; [[ Quadcopter:Hauptseite | Quadcopter-API ]] | + | ; [[ Quadcopter:Hauptseite | Quadcopter-API ]] |
: Um verschiedene Quadrocopter über eine ein einheitliche Schnittstelle und über ein mehrschichtiges Abstraktionsmodell ansteuern zu können, wurde in C++ eine Programmierschnittstelle entworfen und implementiert. | : Um verschiedene Quadrocopter über eine ein einheitliche Schnittstelle und über ein mehrschichtiges Abstraktionsmodell ansteuern zu können, wurde in C++ eine Programmierschnittstelle entworfen und implementiert. | ||
| − | ; [[ SmartphoneCar:Hauptseite | Smartphone-Car ]] | + | ; [[ SmartphoneCar:Hauptseite | Smartphone-Car ]] |
: Mit einem Smartphone wurde die Fernsteuerung eines Modellautos durch Einsatz unkonventioneller Eingabemethoden (z.B. Neigung, Drehung, Schütteln, etc.) und verschiedener Ausgabemethoden (Video, Vibration, Geräusche) entwickelt. | : Mit einem Smartphone wurde die Fernsteuerung eines Modellautos durch Einsatz unkonventioneller Eingabemethoden (z.B. Neigung, Drehung, Schütteln, etc.) und verschiedener Ausgabemethoden (Video, Vibration, Geräusche) entwickelt. | ||
Version vom 3. November 2016, 10:38 Uhr
SWLab — Was ist das?
Im Studium lernt man viel über Informatik aber leider zu wenig über praktische Projektarbeit. Wenn Sie Ihren künftigen Arbeitgeber beeindrucken wollen, ist hier Ihre Initiative gefordert.
Das freiwillige Software-Labor bietet Ihnen die Möglichkeit zusammen mit anderen Studierenden an spannenden Projekten zu arbeiten, eigene Ideen zu verwirklichen und praktische Erfahrungen in den Bereichen Software-Entwicklung, aktuelle Technologien, Programmiersprachen etc. zu machen.
Den Zeitaufwand bestimmen Sie.
Projekte
Hier stellen sich die einzelnen Projekte im Software-Labor nach außen vor (jeweilige Projekt-Hauptseiten) und führen interne Unterlagen, Dokumente und Diskussionen (Unterseiten, nur für angemeldete Teilnehmer).
Teilnehmer am Softwarelabor erhalten die Zugangsdaten zum Wiki per Email, sobald sie sich über die Kontaktadresse swlab@cs.uni-kl.de angemeldet haben.
Derzeit werden im Software-Labor folgende Projekte bearbeitet (Stand: November 2016).
- Robocode
- In diesem Projekt werden die Kämpfe aus Robocode (Informatik-Vorkurs) in die Realität gebracht, um Schaukämpfe darstellen zu können. Zwei kleine Kampfroboter werden in einer auf dem Boden projizierten Arena die Bewegung aus Robocode eins zu eins imitieren und somit den Kampf nachstellen.
- Myo-Armband
- Hier entwickeln Master-Studierende eine Software, um mit einem speziellen Armband (MYO) eine Gestenerkennung für Gebärdensprache zu realisieren.
- Quadcopter
- Hier soll die Steuerung, Navigation und Flugdynamikregelung eines teilautonom fliegenden Quadcopters entwickelt werden. Dabei können neben den internen Lage- und Beschleunigungssensoren auch die von der Onboard-Kamera übermittelten Videodaten und die von außen aufgenommenen 3D-Daten einer Kinect-Kamera genutzt werden, um komplexere Aufgaben lösen zu können (siehe Video).
- Quadcopter-Simulator
- Hier wurde in Java eine Simulationssoftware für Quadrocopter entwickelt. Das darunterliegende physikalische Modell ist parametrisier- und erweiterbar.
- Quadcopter-API
- Um verschiedene Quadrocopter über eine ein einheitliche Schnittstelle und über ein mehrschichtiges Abstraktionsmodell ansteuern zu können, wurde in C++ eine Programmierschnittstelle entworfen und implementiert.
- Smartphone-Car
- Mit einem Smartphone wurde die Fernsteuerung eines Modellautos durch Einsatz unkonventioneller Eingabemethoden (z.B. Neigung, Drehung, Schütteln, etc.) und verschiedener Ausgabemethoden (Video, Vibration, Geräusche) entwickelt.
- μ-Controller
- Dieses Projekt bildet eine Spielwiese für verschiedene kleinere Mikrocontroller-basierte Teilprojekte. Hier können eingebettete Systeme anhand unterschiedlicher Basistechnologien hautnah erforscht werden.
Die hier verlinkten Hauptseiten der jeweiligen Projekte sind öffentlich lesbar,
die Unterseiten und Diskussionsforen stehen nur den angemeldeten SWLab-Teilnehmern zur Verfügung.
Weitere Projekte werden bei Interesse in das Software-Labor aufgenommen.
Bitte kontaktieren Sie ggfs. swlab@cs.uni-kl.de
Betreuer
| Dr. | Joachim Thees, SCI | Leiter des Software-Labors |
| Dipl.-Inform. (FH) | Christian Endler | Organisation, Projektbetreuung |